The elephant trunk is a paradigm of biological engineering, showcasing the remarkable capability of nature to adapt and innovate through evolution. Comprised of 17 muscles, meticulously coordinated by tens of thousands of muscle fibers and supported by an intricate network of neurons, this appendage allows these majestic creatures to traverse their environment with unparalleled dexterity. Their trunks serve multiple functions: they breathe, smell, trumpet communications, gather food, and even throw mud. The sheer versatility of the trunk raises interesting questions about biological design principles and how they can inspire modern technological advancements.
What stands out in the elephant’s trunk is its ability to manipulate objects with astonishing finesse, showcasing a sophisticated control system. This duality of structure and function has captured the attention of researchers who are keen to replicate such functionality in robotics. The research efforts by a diverse team of mathematicians and engineers have unraveled the basic mechanics of the elephant trunk, illuminating pathways to enhance robotic designs that mimic the natural world’s efficiency and complexity.
Mathematics Meets Biology
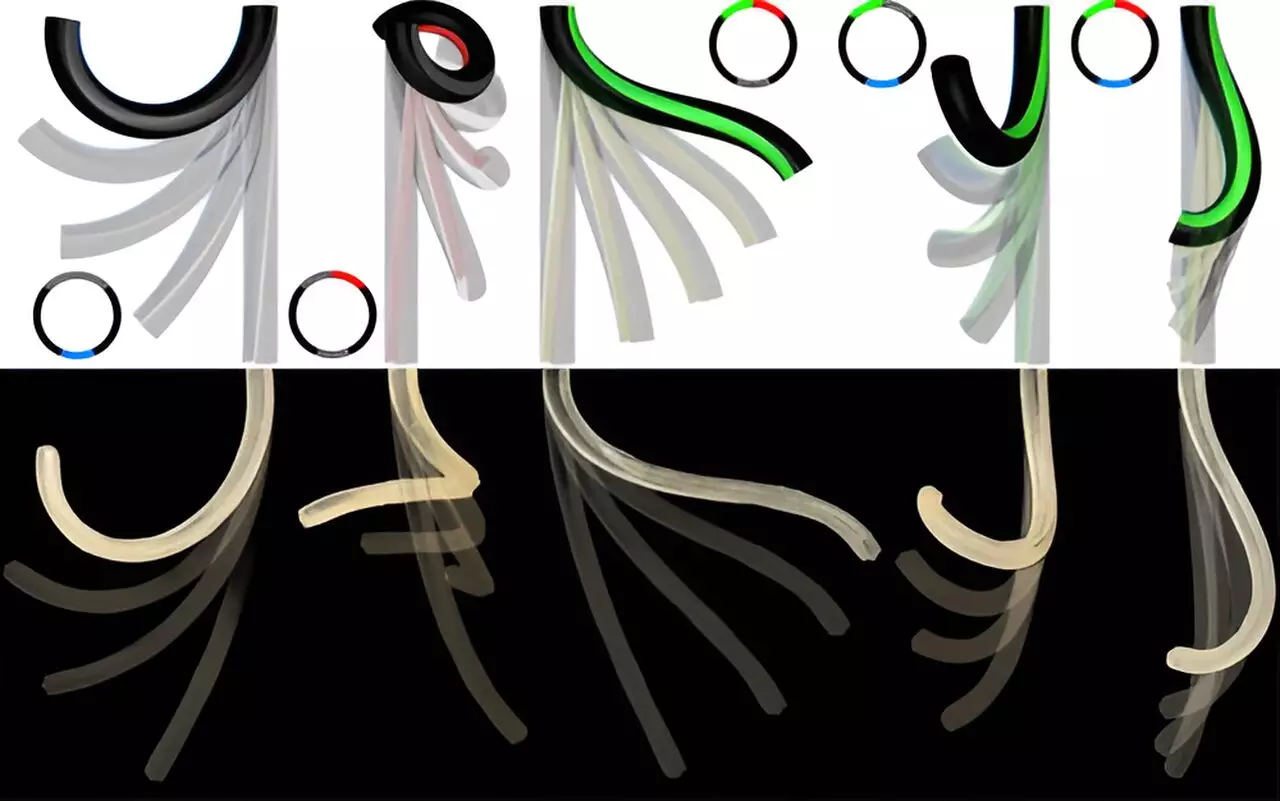
The researchers embarked on a fascinating exploration of the trunk by applying mathematical modeling to represent its construction and operation. By reducing the complexity of the 17 muscles into three core actuators—longitudinal and helical—they demonstrated that a seemingly simple mechanism could replicate the intricate movements exhibited by the trunk. This approach exemplifies how multidisciplinary research can bridge the gap between biology and engineering, providing innovative solutions for challenges in robotics.
Alain Goriely articulated the significance of their findings, noting that they discovered a revolutionary way to harness the physics of shape control. The mathematics revealed that combining the longitudinal actuators with opposing helical actuators led to a surprising range of deformative capabilities. This minimalistic approach advances the field by demonstrating that less can undoubtedly be more, especially in designs intended for sophisticated, three-dimensional movement.
From Theory to Physical Reality
The transition from mathematical models to tangible applications provided a remarkable illustration of ingenuity. Utilizing advanced 3D printing techniques, the researchers developed a polymer-based cylindrical structure that behaves similarly to an elephant’s trunk. The implementation of liquid-crystalline elastomer fibers allows for a controlled contraction, creating movement that can bend or twist, echoing the motions of the trunk. This ability to independently control each actuator makes the robot arm uniquely adaptable, offering an exciting glimpse into future robotics that prioritize flexibility and dynamic capabilities.
Through rigorous testing, the team calculated the “reachability” of their model trunk, revealing that a minimal design could extend far beyond traditional robotic arms. This expansive reachability is not merely a theoretical triumph; it opens doors to tangible applications in various fields, from agriculture to manufacturing. The ability to perform complex tasks such as grasping and rotating objects mirrors natural behaviors in elephants, a fact that highlights the importance of the biomimetic design approach.
Challenges Ahead
Despite its accomplishments, this novel robotic arm is not without limitations. The inability to elongate or shorten the trunk could affect its utility in specific environments or tasks that require varied lengths for optimal function. Furthermore, understanding how well the model handles different weights and sizes presents another layer of complexity that requires further exploration. This underscores the need for ongoing investigation into the integration of such systems into scalable robotic applications.
While current designs triumph over traditional robotic arms in terms of reachability, the next step involves refining these systems to enhance versatility and efficiency. The world of robotics is abuzz with the potential for innovations inspired by nature, with the elephant trunk serving as a significant touchstone for future advancements.
Exploring how these principles can be applied to create even more complex robotic systems could redefine industries reliant on robotic manipulation, expanding their boundaries far beyond what is currently achievable. The integration of natural engineering into robotics not only enriches our technical capabilities but also challenges our understanding of creation and invention powered by nature itself.
Leave a Reply