In a world increasingly defined by advancements in automation, the evolution of robotics has long been constrained by traditional motor-driven mechanisms. For nearly 70 years, inventors and researchers have developed machines intended to replicate human movement and adaptability, yet these creations share a fundamental limitation: they rely on motors that are over two centuries old. This lack of innovation raises critical questions about mobility, efficiency, and the future of robotics. In a groundbreaking study, however, researchers from ETH Zurich and the Max Planck Institute for Intelligent Systems have introduced a new paradigm with the development of a muscle-powered robotic leg, unveiling the potential for machines that can not only mimic movements more naturally but also interact effectively with their environments.
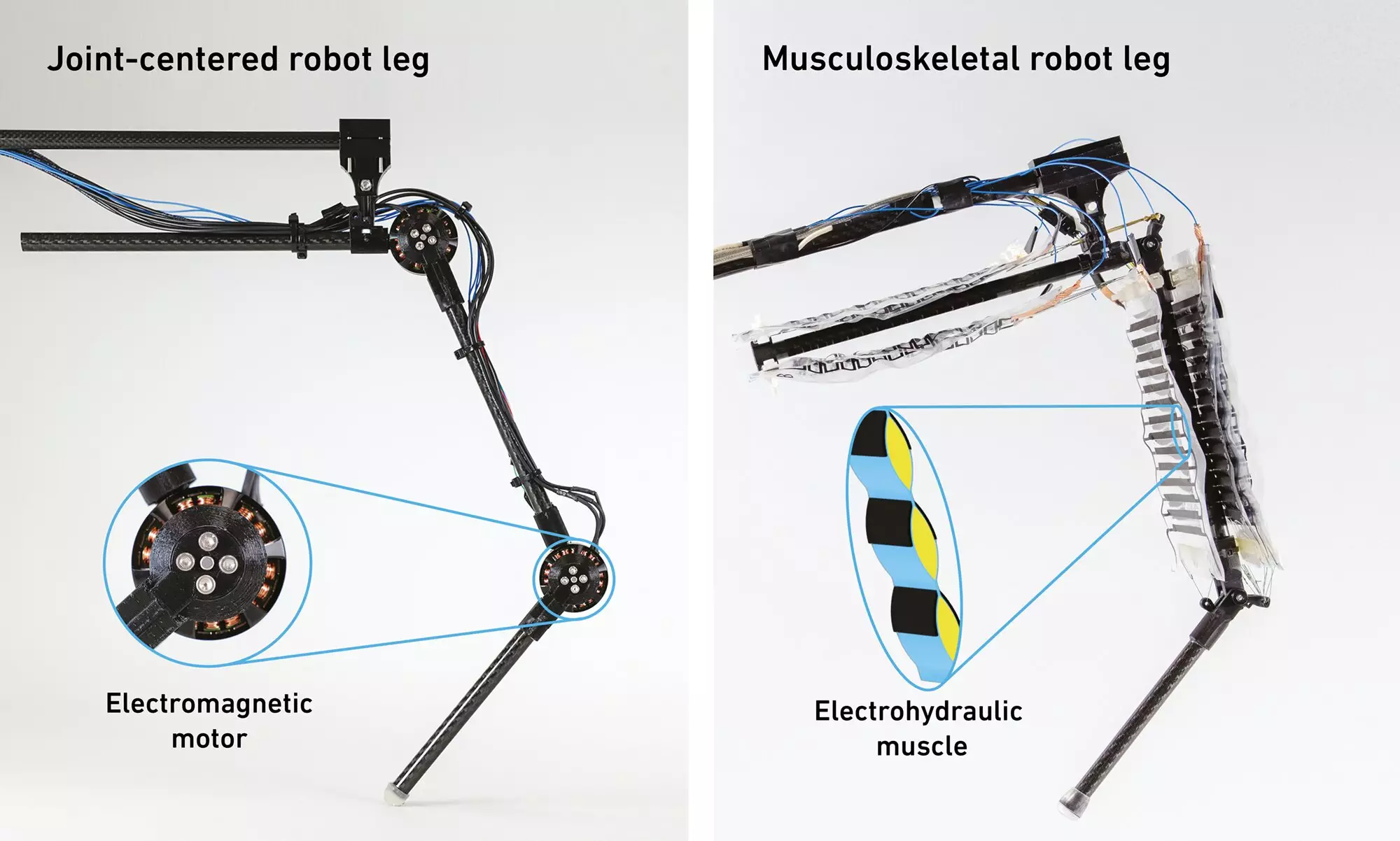
Traditional robotic systems, even those designed to walk, utilize motors and gears to simulate human-like movements. It is evident that this motor-centric approach often leads to limitations in adaptability and efficiency, making robots less versatile than living creatures. The new muscle-powered leg developed by the collaborative team at ETH Zurich and MPI-IS takes inspiration from the biological structure of muscles found in animals, integrating electro-hydraulic actuators known as HASELs. These actuators function similarly to the muscles in human limbs, allowing the robotic leg to perform actions such as jumping and changing speeds with remarkable agility.
The HASELs are unique in their construction: oil-filled plastic bags coated with electrodes that respond to electrical input. When voltage is applied, the electrodes create a static charge that brings them closer together, effectively shortening the bag and creating motion. This mimics the action of muscular contraction and relaxation, illustrating a crucial leap toward achieving the dynamic capabilities inherent in biological locomotion.
One of the most compelling advantages of this muscle-powered design is its energy efficiency. Traditional robots powered by electric motors often waste energy converting it into heat, especially when holding fixed positions. In the infrared analysis conducted by the researchers, it became clear that the muscle-driven design maintains a consistent temperature without the need for heat management systems, such as fans or dissipating heat sinks. Such efficiency not only enhances operational longevity but also sets the stage for more environmentally conscious robotics.
Moreover, the adaptability of the new robotic leg is evident in its ability to interact dynamically with its surroundings, akin to how humans adjust their movements in response to varying terrains. Rather than relying on sensors to gauge joint angles, this innovative system is capable of adjusting itself based on simple instructions—one to flex and one to extend—much like human instinct. This ability to respond to external stimuli without over-reliance on complex programming enhances the leg’s functional versatility.
The field of electrohydraulic actuators is still in its infancy and has significant potential for revolutionizing the realm of robotics. With advances in controls and machine learning, the evolution of more sophisticated hardware is imminent. The use of artificial muscles is not merely an interesting concept; it underscores the vital role that novel hardware plays in pushing robotics into new territories of functionality. Applications such as gripping devices highlight the flexibility afforded by muscle-powered technology. These robots can customize their movements according to the specific characteristics of the objects they are handling, whether it’s a delicate tomato or an egg.
Despite the numerous advantages, it is important to recognize the current limitations of muscle-powered systems. As noted by researcher Robert Katzschmann, the existing prototype is still tethered to a rod and lacks the capability for free movement. This is an area earmarked for future exploration, where overcoming these constraints could usher in a new era of autonomous walking robots powered by this groundbreaking technology.
The integration of muscle-powered technology opens exciting prospects for the field of robotics. As researchers transcend the boundaries of traditional motor-driven systems, the emergence of machines that better mimic the natural movements and adaptations of living organisms presents possibilities previously deemed unattainable. While electrification and machine learning have propelled robotics forward, it is crucial not to underestimate the revolutionary potential brought by hardware advancements. As ongoing studies aim to refine these designs and enable fully autonomous locomotion, the world stands on the cusp of a transformative leap in robotic capabilities. The advent of muscle-powered robotics not only enhances efficiency but also embodies a paradigm shift essential for the next generation of intelligent machines.
Leave a Reply