In recent years, unmanned aerial vehicles (UAVs), commonly referred to as drones, have emerged as transformative tools in various fields, including environmental monitoring and urban planning. These autonomous flying devices offer innovative solutions for capturing an array of data, enabling the generation of detailed maps and intricate three-dimensional (3D) visualizations of different terrains. Recent research by scholars at Sun Yat-Sen University and the Hong Kong University of Science and Technology introduces an intriguing system called SOAR, which promises to revolutionize the way multi-UAV teams explore and reconstruct environments.
The SOAR system is designed with the intention of making the 3D reconstruction of environments both efficient and high-quality. As explained by Mingjie Zhang, a co-author of the study, their motivation arose from current methodologies that typically fall into two distinct categories. Model-based approaches, which rely heavily on pre-existing maps and information, can lead to significant time and resource consumption. In contrast, model-free methods offer real-time exploration and reconstruction but often suffer from the limitations inherent in local planning constraints.
To address these limitations, the SOAR system was conceptualized to harness the strengths of both methodologies. The research team aimed to create a heterogeneous multi-UAV system that facilitates simultaneous exploration and data collection to build comprehensive environmental reconstructions.
Central to the functionality of SOAR is its incremental viewpoint generation technique. This method allows the UAVs to adapt to data gathered over time, ensuring a more effective data collection process. Furthermore, the system incorporates a sophisticated task assignment strategy that optimizes the efficiency of the multi-UAV team, ensuring a streamlined approach to data collection.
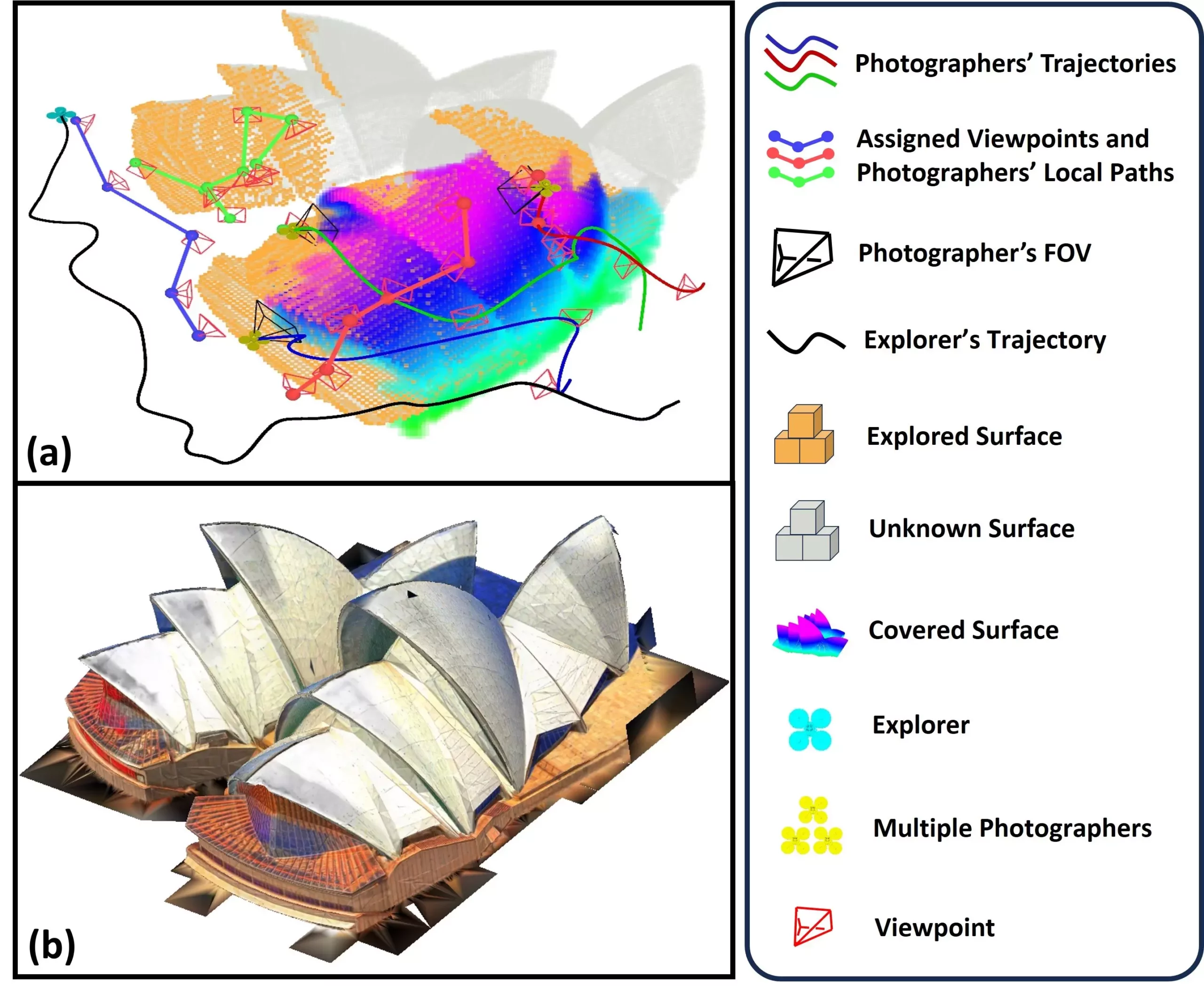
SOAR operates through a team of UAVs, including one designated as an explorer equipped with LiDAR technology for swift scanning, and multiple UAVs acting as photographers, which are outfitted with cameras to capture detailed visual information. This division of labor not only enhances efficiency but also improves the overall quality of the 3D reconstructions generated.
The operational flow of the SOAR system begins with the explorer UAV, which employs a surface frontier-based strategy to navigate and map the environment effectively. As it collects spatial data, the system incrementally develops viewpoints that promote comprehensive surface coverage. The subsequent phase involves the photographer UAVs visiting the designated sites to capture visual data, employing the Consistent-MDMTSP method to balance workload and maintain coordination among the UAVs.
A noteworthy aspect of SOAR is its dual capability to collect data from both LiDAR and visual sensors, which significantly enhances the quality and efficiency of environmental exploration. By adjusting to dynamically changing scene information and consistently tasking UAVs, SOAR minimizes unnecessary detours and optimizes scanning efficiency.
Zhang and his colleagues conducted extensive simulations to evaluate the efficacy of the SOAR system. Their results were impressive, indicating that SOAR surpassed existing state-of-the-art methodologies for 3D environmental reconstruction. A significant takeaway from their study was the introduction of an innovative framework that marries real-time planning with efficiency—an essential combination for dynamic reconstruction tasks.
The implications of this advanced UAV system are far-reaching. SOAR’s ability to deliver quick and precise 3D reconstructions could serve diverse applications such as urban planning, infrastructure inspection, cultural heritage preservation, and disaster response. Its utility in these areas underscores the potential impact on both public safety and economic development.
Looking ahead, the research team envisions an array of applications for SOAR in real-world contexts. For instance, its capability to rapidly assess damage following natural disasters could greatly enhance response efforts and recovery planning. Additionally, SOAR might be utilized in creating high-fidelity 3D models of cities, enabling urban planners to visualize and analyze infrastructural changes effectively.
However, to exploit its full potential, future research will focus on bridging the “Sim-to-Real Gap,” addressing challenges such as localization inaccuracies and communication interruptions in real-world scenarios. Enhancing task allocation strategies will further improve synchronization among UAVs, expediting the mapping process and potentially incorporating predictive modules for smarter environmental analysis.
The SOAR system represents a significant leap forward in 3D environment reconstruction through the synergy of autonomous UAV technology and advanced algorithmic design. By utilizing a multi-UAV framework that adapts responsively to real-time data, SOAR not only improves the efficiency of data collection but also ensures high-quality reconstructions that can benefit various sectors. As researchers continue to refine this technology, we can anticipate its transformative influence on how we navigate and understand the environments around us.
Leave a Reply