In the realm of robotics, the demand for versatile and adaptive devices is surging, particularly with the rise of soft robotics. Soft pneumatic actuators (FSPAs) have emerged as groundbreaking solutions due to their ability to interact safely with environments and humans. Unlike their rigid counterparts, FSPAs offer flexibility, allowing for gentle manipulation and the ability to conform to varying shapes. A recent study published in Scientific Reports proposes a novel technique for the design and manufacture of these actuators by employing Turing patterns, a concept rooted in the work of the renowned mathematician and logician, Alan Turing.
Turing patterns originate from reaction-diffusion processes: systems involving two substances, where one encourages growth while the other inhibits it. This interaction fosters distinct and stable patterns, visible in nature as stripes on animals or the spiral arrangement of shells. The innovative research conducted by Dr. Masato Tanaka and his colleagues from Toyota Central R&D Labs. integrates Turing’s morphogenesis theory into the design of FSPAs. By harnessing the principles underlying these naturally occurring patterns, the team aims to enhance the actuators’ design processes, enabling them to perform complex movements in a more controlled manner, with minimal reliance on specialized materials.
The research highlights the functional challenges that traditional actuators face, particularly concerning design intricacies and excessive trial-and-error necessary in material selection. Turing patterns provide a sophisticated framework for resolving these issues. They promote a significant leap in the potential of soft robotics, utilizing mathematical modeling to optimize performance outcomes, thus expediting the creation of these actuators.
Despite the promising attributes of FSPAs, the design and manufacturing processes are fraught with complexity. Traditional methods often rely on isotropic materials that exhibit uniformity in every direction, making them resource-intensive and cumbersome to manage. Achieving controlled deformation in these structures typically necessitates alteration through rigorous testing, where trial-and-error methods can prove lengthy and costly.
Dr. Tanaka articulates the necessity of developing pneumatic actuators that function with precise movements using straightforward mechanisms. The challenge lies in implementing a design that allows for customizable movement without introducing unnecessary complications or costs. Through Turing patterns, the research team proposes a shift from conventional isotropic materials to anisotropic materials, where the orientation of fibers can be controlled, facilitating more nuanced and versatile designs.
At the core of this research is the gradient-based orientation optimization method, which reshapes the approach to material usage. By manipulating the orientation of fabrics’ fibers, researchers were able to translate the mathematical theories of anisotropic reaction-diffusion systems into tangible designs. This nonlinear finite element method serves as the foundation for converting optimized orientations into practical patterns that ensure the desired motion characteristics of the actuators.
The resulting designs stand apart through their ability to incorporate distinct surface textures into the fabrication process. These textures serve a pivotal role in enabling the soft actuators to deform in strategically predetermined ways, allowing for heightened responsiveness and flexibility in various applications.
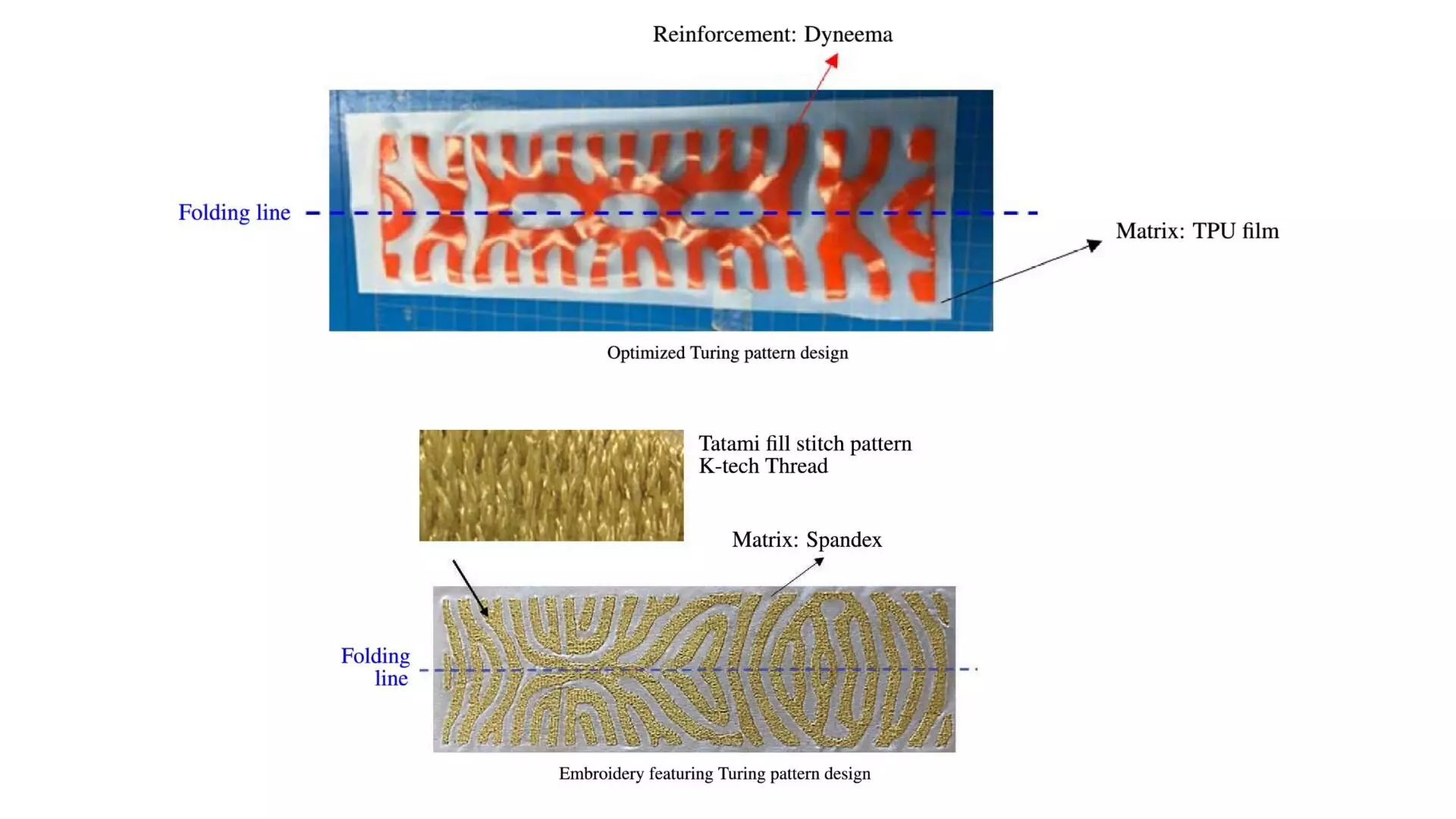
Fabrication methods for these Turing-pattern-based actuators are equally revolutionary. The research explores heat bonding and embroidery techniques as strategies to implement the sophisticated designs in practical applications. Heat bonding involves laser cutting a rigid fabric into a Turing pattern and adhering it to a softer substrate, while embroidery embeds these patterns directly into the fabric, creating regions of varying stiffness to manipulate movement effectively.
Both fabrication techniques reveal scalable production possibilities that hold the promise for widespread applications in fields like robotics, wearable technology, and assistive devices. Their adaptability, combined with cost-effective manufacturing, ushers in a new era for FSPAs in various industries, where precision and responsive motion are critical.
The research team anticipates that their work will not only optimize existing designs but will also pave the way for integrating Turing patterns with emerging materials, such as shape memory alloys and electroactive polymers. This future exploration could enhance the kinetic capabilities of FSPAs, leading to even more advanced and dynamic performance algorithms.
Moreover, the exploration of 3D printing combined with Turing pattern methodologies signifies a potential revolution in actuator production, further increasing fabrication speed and material efficiency. The team’s vision of expanded production scales and advanced designs heralds exciting possibilities for soft robotics.
The integration of Turing patterns into the design of fabric-based soft pneumatic actuators represents a significant advancement in soft robotics. As researchers continue to innovate, the applications for these actuators seem boundless, enhancing both the functionality and safety of robotic devices in an increasingly automated world. This journey into the realms of mathematics, design, and robotics showcases a remarkable intersection of disciplines, pushing the boundaries of what soft robotics can achieve.
Leave a Reply