Advancements in robotics have often struggled to match the fluidity and adaptability inherent to human movement. Tasks that seem trivial for an individual—like retrieving a book from a cluttered shelf—represent a significant challenge for robotic systems. This capability, rooted in complex planning and the ability to navigate unpredictable physical environments, has been an area of focus for researchers aiming to enhance robotic dexterity. A pioneering approach from Carnegie Mellon University’s Robotics Institute (RI), heralded as Neural Motion Planning, presents a promising solution that leverages artificial intelligence to navigate the intricacies of everyday environments with greater efficiency.
At its core, motion planning is the methodology applied in robotics to enable a machine to obtain an object from one location to another without colliding with obstacles. Traditional motion planning approaches rely heavily on computational models that perform extensive checks for possible collisions. This process can be prohibitively slow, demanding thousands if not millions of checks to guarantee accurate navigation. As Murtaza Dalal, a doctoral student at RI, points out, such algorithms falter in dynamic or unstructured settings where the environment can vary unpredictably.
The limitations of conventional algorithms stem from their dependency on pre-defined parameters, which often fail to account for the multitude of unforeseen variables present in real-world scenarios. In doing so, they lack the fluid adaptability that humans exhibit, where movement and decision-making are informed by immediate surroundings and past experiences.
Neural Motion Planning: A Game Changer
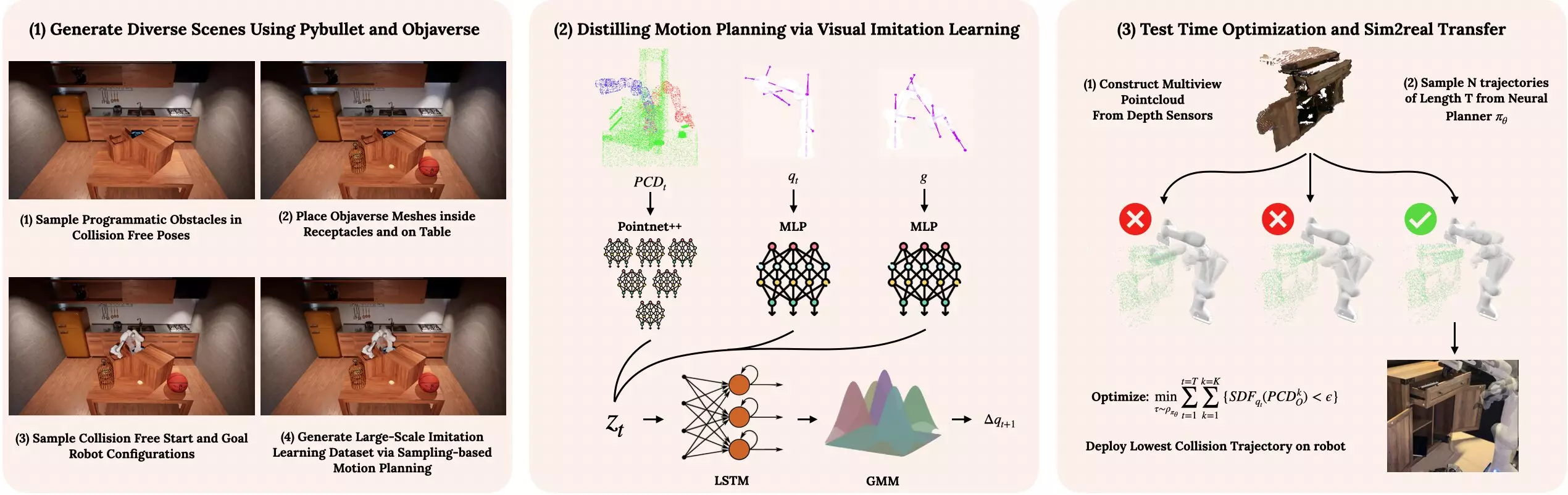
Neural Motion Planning represents a significant deviation from prior methodologies, drawing inspiration from the way humans learn to navigate new experiences incrementally. Rather than relying on rigid algorithms, this novel system utilizes a single, versatile AI model capable of processing motion plans in various unstructured environments. By training the model across a myriad of simulated household contexts—such as shelves, cabinets, and even the presence of random objects like pets or decorative items—the researchers have imbued the robotic system with a level of versatility previously unattainable.
The aim of Neural Motion Planning is twofold: to enhance the ability of robots to adapt their motions in unpredictable environments and to ensure quicker response times through advanced reactive planning. By simulating millions of scenarios, the researchers not only trained the model to recognize diverse household configurations but also distilled the learned experiences into a generalist policy that enables it to tackle novel challenges not explicitly encountered during training.
The implications of this breakthrough in neural motion planning are vast and far-reaching. As pointed out by Deepak Pathak, the Raj Reddy Assistant Professor at RI, traditional sectors of AI, such as vision and language processing, have seen considerable advancements—often exemplified by tools like ChatGPT. However, robotics has lagged in achieving similar success. Neural Motion Planning epitomizes a major leap in this area, serving as a foundational step toward building more capable and intelligent robotic systems capable of functioning in real-world settings.
Employing cutting-edge depth cameras for scene recognition, RI has successfully demonstrated the efficacy of Neural Motion Planning on robotic arms within controlled lab environments. By offering a comprehensive three-dimensional representation of the space, researchers were able to precisely guide the robotic arm towards specific goals while deftly avoiding obstacles including furniture and fixtures. The results, as noted by RI master’s student Jiahui Yang, highlight an exciting advancement where a single model efficiently maneuvers through diverse challenges, paving the way for more intuitive interactions between humans and machines.
As exploration into neural motion planning continues, the potential applications for this technology are indeed broad, encompassing sectors such as home automation, healthcare, and logistics. Individuals reliant on assistive devices, for instance, could benefit from robots that understand their environments and seamlessly adapt to dynamic scenarios, thereby improving autonomy and quality of life.
Neural Motion Planning heralds a new era in robotic research, characterized by improved adaptability, intelligent learning, and real-time responsiveness. As researchers refine this groundbreaking methodology, we may be on the brink of seeing robots that not only assist in our daily tasks but also integrate seamlessly into our lives, mirroring human capabilities in empathy and efficiency.
Leave a Reply